



Type |
N/A KA Series Motors with Encoder Motors (1.8 Degree/Step) - NEMA 17 / 23 |
Applicable Motor |
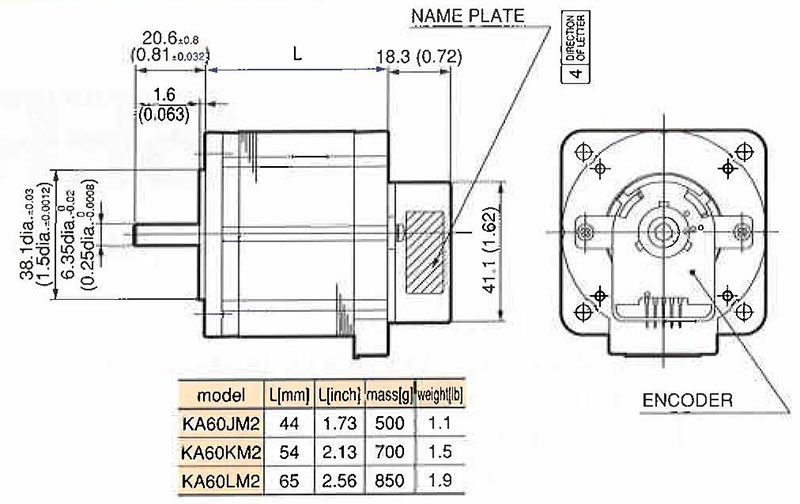
N/A KA60KM2-551 |
Motor Frame Size |
N/A 60 x 60 mm2.36 x 2.36 in |
No. of Phases |
N/A 2 |
Rotor Inertia |
N/A 1.5 oz·in²270 g·cm² |
Features |
N/A
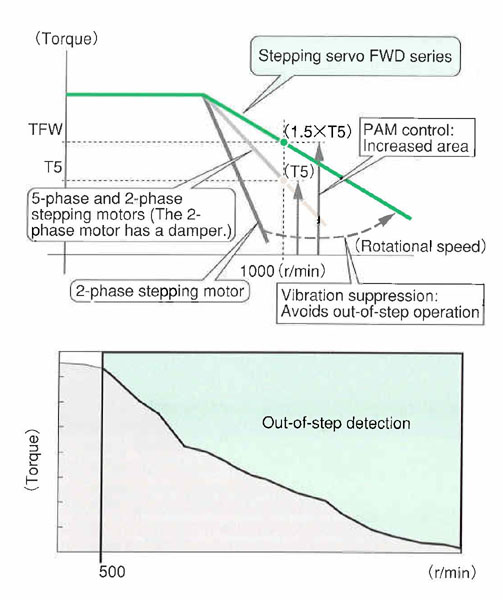
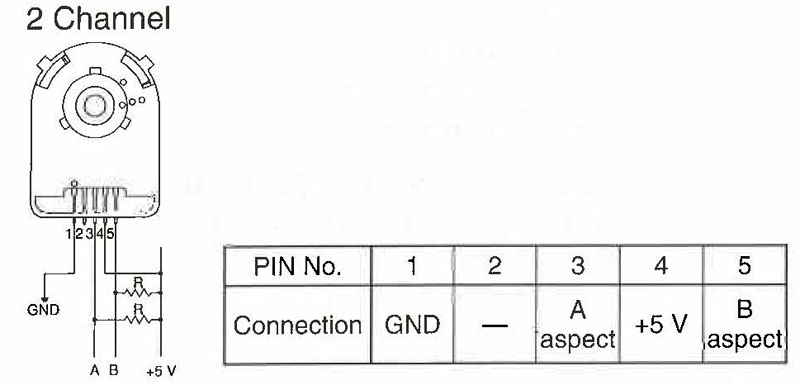
Stepping motors that can be operated at high speed: Thanks to a new control system, in which the rotor position is monitored and the excitation timing is controlled, motors can be run at 2000 rpm or more without using an external damper. This new control system is effective in saving space by eliminating an external damper and in reducing the tact time of a high-speed drive. Thin drivers with a micro-step function: These are 24V DC input drivers. A micro-step drive electrically subdivides the basic step angle, making it possible to have a basic step angle ranging from 0.72° own to 0.009° without using a gear head. The resolution can be easily set using a rotary switch attached to a driver. The driver size is 5.31 (L) x 2.89 (W) x 1 (H), and the driver design is very thin. These drivers are most suitable in applications involving multiple shafts. Vibration suppression: Since a spark-advance-control-system drive circuit controls the phase of the current relative to the polar position, vibration control is possible in principle. This is supplemented by our own vibration suppression function which uses a microcomputer. With this function, vibration at high speeds is effectively suppressed, leaving only a very small amount of vibration. Variety of output signals: Previously, detecting an out-of-step condition in a stepping motor was not possible using only stepping motors and drivers. Now the impossible has become possible using polar position information. (At 500 rpm or more) Detecting this signal allows more accurate control. In addition to this signal, an alarm signal and an index signal are output. |
Product Type |
N/A Stepper Motor |
Series |
N/A 2 Phase Round KA |
Motor Frame Size |
N/A NEMA 23 |
Step Angle |
N/A 1.8 deg./step |
Voltage per Phase |
N/A 2.41 V |
Current per Phase |
N/A 3.3 A |
Resistance per Phase |
N/A 0.73 Ω |
Inductance per Phase |
N/A 2.1 mH |
Holding Torque |
N/A 171 oz·in1207 mN·m |
Detent Torque |
N/A 7.1 oz·in50 mN·m |
Winding Method |
N/A Bipolar |
Weight |
N/A 700 g1.5 lb |
|
|
|
|
|
|



|
N/A Custom Designs |